Loading...
Searching...
No Matches
ph::RectangularSensorReceiver Class Referenceabstract
A receiver with a rectangular sensor installed. More...
#include <RectangularSensorReceiver.h>
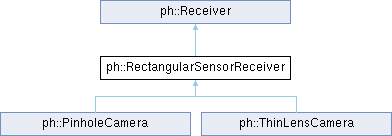
Inheritance diagram for ph::RectangularSensorReceiver:
Public Member Functions | |
| RectangularSensorReceiver (const math::Vector2D &sensorSize, const math::Transform *rasterToSensor, const math::RigidTransform *receiverToWorld) | |
| math::Spectrum | receiveRay (const math::Vector2D &rasterCoord, Ray *out_ray) const override=0 |
| Generate a ray received by the receiver. | |
| void | evalEmittedImportanceAndPdfW (const math::Vector3R &targetPos, math::Vector2R *const out_filmCoord, math::Vector3R *const out_importance, real *out_filmArea, real *const out_pdfW) const override=0 |
| const math::Vector2D & | getSensorSize () const |
| const math::Transform & | getRasterToSensor () const |
 Public Member Functions inherited from ph::Receiver Public Member Functions inherited from ph::Receiver | |
| Receiver (const math::RigidTransform *receiverToWorld) | |
| virtual | ~Receiver ()=default |
| const math::RigidTransform & | getReceiverToWorld () const |
Detailed Description
A receiver with a rectangular sensor installed.
Constructor & Destructor Documentation
◆ RectangularSensorReceiver()
| ph::RectangularSensorReceiver::RectangularSensorReceiver | ( | const math::Vector2D & | sensorSize, |
| const math::Transform * | rasterToSensor, | ||
| const math::RigidTransform * | receiverToWorld ) |
- Parameters
-
sensorSize Size of the installed sensor. rasterToSensor Transform from raster to sensor position (in receiver space). receiverToWorld Transform from receiver to world space.
Member Function Documentation
◆ evalEmittedImportanceAndPdfW()
|
overridepure virtual |
Implements ph::Receiver.
Implemented in ph::PinholeCamera, and ph::ThinLensCamera.
◆ getRasterToSensor()
|
inline |
◆ getSensorSize()
|
inline |
◆ receiveRay()
|
overridepure virtual |
Generate a ray received by the receiver.
Given raster coordinates, generate a corresponding ray that would have hit that location from the light entry of the receiver. The light entry would be the outmost surface of a camera's lens system for example. This method is for Monte-Carlo sampling.
- Returns
- A weighting factor for the received quantity. Proper sensor response and sampling PDF are included in the returned weight.
Implements ph::Receiver.
Implemented in ph::PinholeCamera, and ph::ThinLensCamera.
The documentation for this class was generated from the following files:
- Source/Core/Receiver/RectangularSensorReceiver.h
- Source/Core/Receiver/RectangularSensorReceiver.cpp